
Welcome to CivilGEO Knowledge Base
Welcome to CivilGEO Knowledge Base
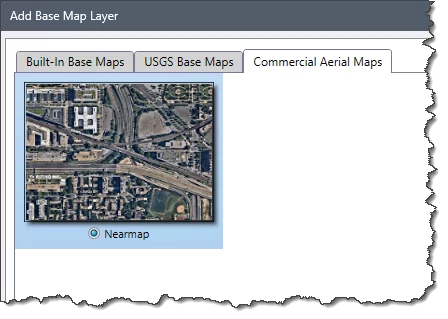
Nearmap is a commercial aerial imagery and geospatial data service provider that delivers some of the most regularly updated and high-resolution satellite imagery currently available. These images are generated from individual aerial photos that are automatically captured by an aircraft, which makes regular or scheduled flights over very large survey areas of entire cities or regions, usually between 700 km2 to 10,000 km2. For more details, please visit the Nearmap website.
Nearmap provides frequently updated, high-resolution aerial imagery of urban and regional areas, including cities and suburbs that cover 80% of the US population, 65% of Canada’s population, 95% of Australia’s population, and 75% of New Zealand’s population. This is a credential-based service, which gives users with access to the Nearmap imagery service rights to the use of this mapping service.
For every location included under the Nearmap coverage program, the map displays the number of planned captures per year, as well as the type of content (currently Vertical, Oblique, 3D) available for that area.
Using the following table, the user can find the coverage of the Nearmap service for different regions.
| Region | Coverage Map |
|---|---|
| Australia | https://www.nearmap.com/au/en/current-aerial-maps-coverage#/coverage-checker |
| New Zealand | https://www.nearmap.com/nz/en/current-aerial-maps-coverage#/coverage-checker |
| The United States and Canada | https://www.nearmap.com/us/en/current-aerial-maps-coverage#/coverage-checker |
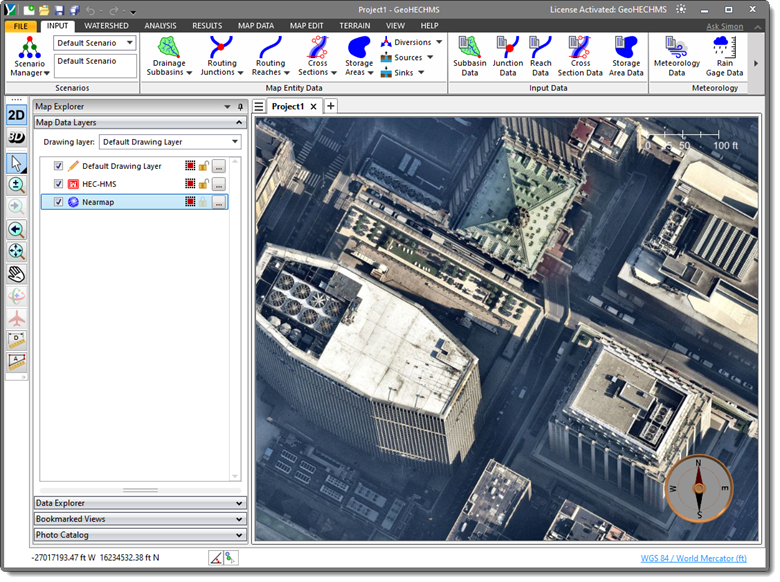
Nearmap measurement tools use local representations of the Earth’s surfaces that are typically accurate to +/- 15cm for distances up to 200m.
Nearmap’s vertical imagery is made up of mosaics of orthorectified images. This means that each raw photo of the Nearmap imagery has the full orthorectification process applied, including the removal of terrain distortions, lens distortions, etc. Individual orthoimages are then merged into a mosaic, which is the map image that is visible to the end users. Nearmap’s processing system can handle difficult situations such as cloud and smoke, and it has a far lower blunder rate than older orthophoto solutions. Their imagery processing is fully automated and is intended to generate Nearmap images everywhere in the world without the need for any ground control point data.
Nearmap’s capture procedure utilizes GPS coordinates, which are improved further using PPP (Precise Point Positioning). As a result, the generated imagery is georeferenced at the time of collection using International Terrestrial Reference System (ITRF2014).
The various image types offered by Nearmap are as follows:



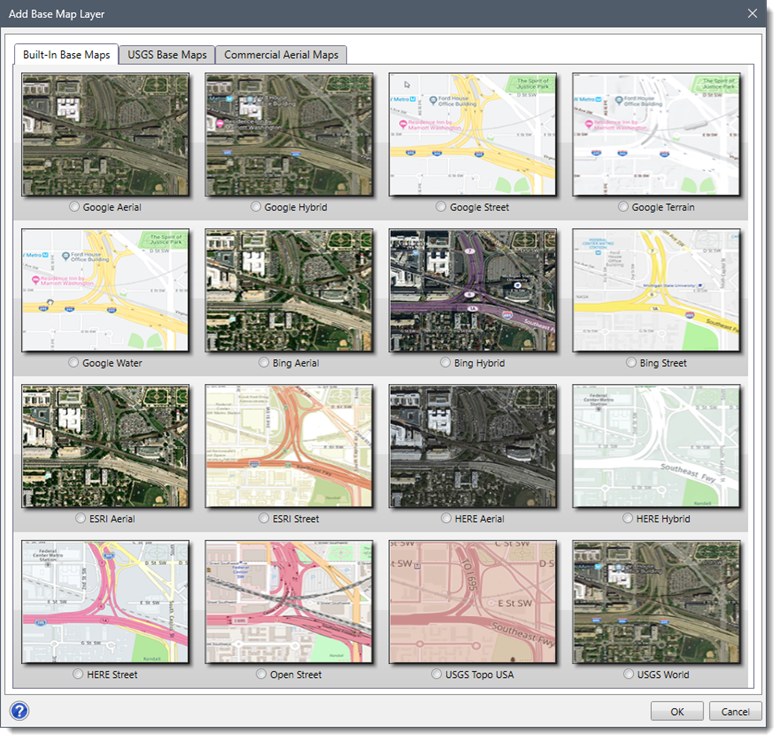
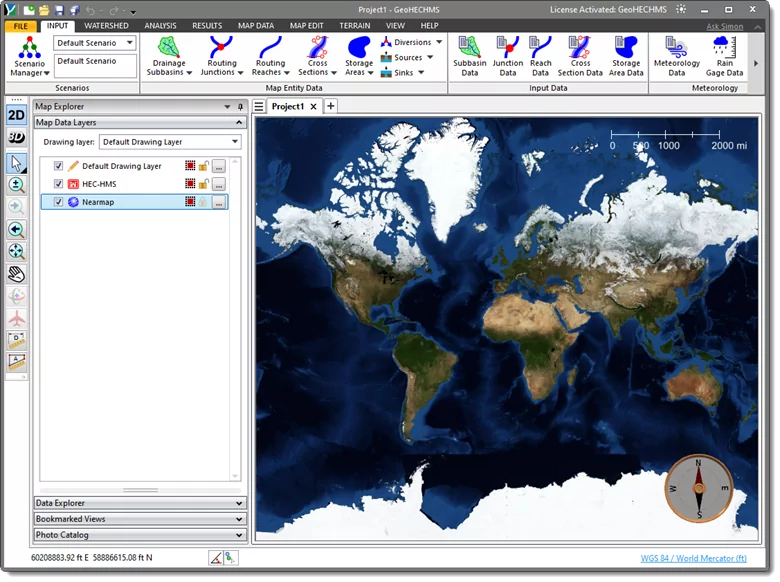
The Nearmap Imagery Service is added into the CivilGEO software as a base map service using the Add Base Map Layer command. A base map layer provides high-quality background aerial and other imagery from different online map providers to add context to the engineering data being displayed on the Map View.
Follow the steps below to use Nearmap Imagery Service in our software:
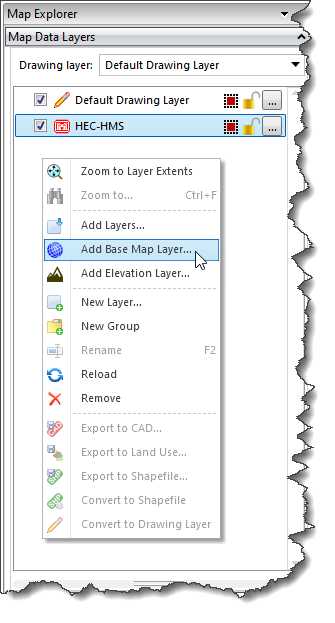 Alternatively, the user can select the Add Base Map Layer command from the Map Data ribbon menu.
Alternatively, the user can select the Add Base Map Layer command from the Map Data ribbon menu.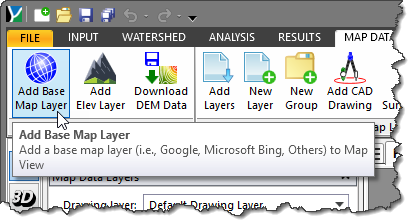







CivilGEO G2 Reviews
4.8/5.0 Rating, Over 230 Reviews

GeoHECRAS is recognized as the top Civil Engineering Design Software with an average of 4.8 out of 5.0 rating from over 230 real user reviews on G2.



We use cookies to give you the best online experience. By agreeing you accept the use of cookies in accordance with our cookie policy.
When you visit any web site, it may store or retrieve information on your browser, mostly in the form of cookies. Control your personal Cookie Services here.








