
Welcome to CivilGEO Knowledge Base
Welcome to CivilGEO Knowledge Base
LiDAR (which stands for Light Detection and Ranging), sometimes called laser scanning or 3D scanning, is a remote sensing technology that uses a pulsed laser to generate a 3D spatial representation of the surveyed environment in the form of highly accurate 3D point cloud data.
Lidar data is stored in one or more LAS or LAZ (compressed form of the LAS) files—the industry-standard binary format for storing lidar data. Lidar data files can be quite large, containing billions of 3D points. These massive data files can affect the processing speed and responsiveness of software that loads it.
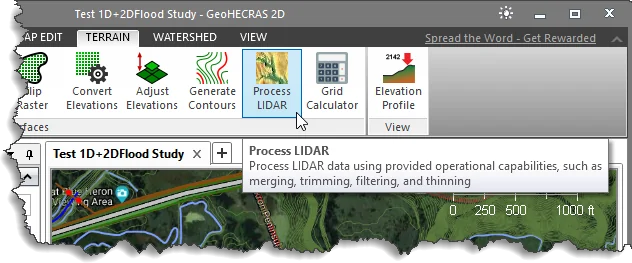
Therefore, sometimes as per the project’s requirements, lidar data needs to be filtered to reduce the size of the overall data. CivilGEO’s software can perform this filtering process using the Process LIDAR command. In addition, this command provides many other functions, including point cloud classification filtering, extraction of buildings and other structures, terrain surface generation, and much more. Some of the command’s functions include:
To use the Process LIDAR command, the user must have already loaded the LIDAR data into the project. Refer to this article on how to load a LIDAR elevation layer.
Follow the steps below to process the LIDAR data:
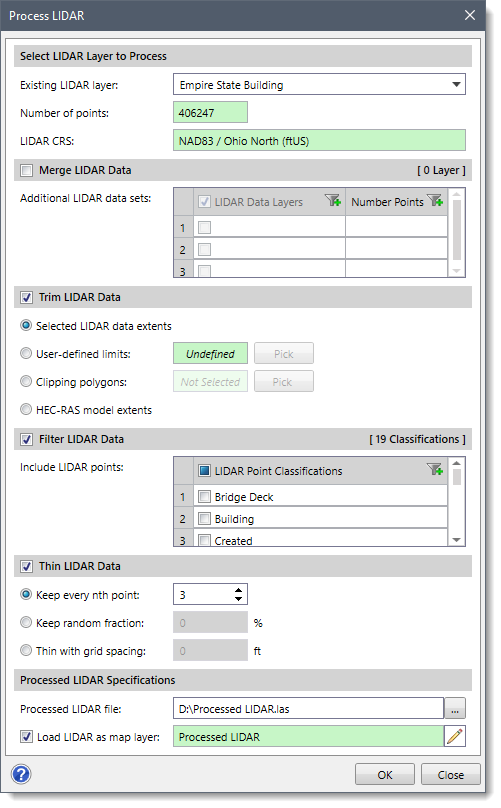
The following sections describe the Process LIDAR command and how to interact with the above dialog box.
This section controls the selection of the LIDAR layer to be processed from loaded LIDAR layers.
From the Existing LIDAR layer entry, select the LIDAR elevation layer that needs to be processed. Upon selecting the LIDAR elevation layer, the software will display the number of points contained in the LIDAR layer as well as the layer’s corresponding coordinate reference system (CRS).
This section allows the user to select additional LIDAR layers to include and merge into the selected LIDAR layer, and then export into the final resultant LIDAR file.
This section allows the user to trim down the extents of the exported LIDAR file. There are multiple methods for defining the data extents from the Map View.
This section is used to filter the LIDAR data based upon each LIDAR’s point classification. By default, the filter is set to filter everything out except for Ground (i.e., Bare Earth). The American Society for Photogrammetry and Remote Sensing (ASPRS) has defined a list of classification codes for LIDAR. Example classes include:
A point can be classified into more than one category.
This section is used for thinning large LIDAR data sets.
Point clouds and LIDAR data sets can contain billions and billions of points. Many of the points are redundant and do not add any additional definition to the surface or object that they are describing. Also, loading large data sets can severely slow down the computer as it labors to load the data into memory. These thinning options function to remove redundant LIDAR points.
This section describes how to save LIDAR data after it has been processed.
Click the […] button for the Processed LIDAR file entry to specify the directory location to save the processed LIDAR file.
After the options have been defined, click the [OK] button, and the software will process the LIDAR data and save it as a new LIDAR file.
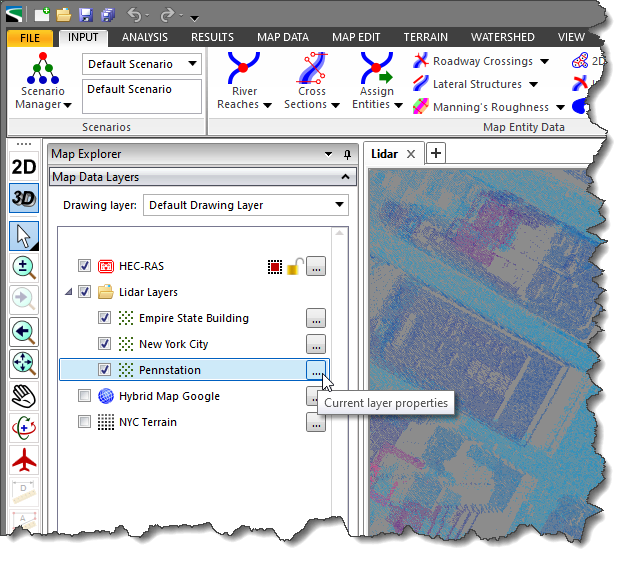
In addition, after the LIDAR data has been processed, the software can then load this LIDAR data as a new layer in the Map Data Layers panel.
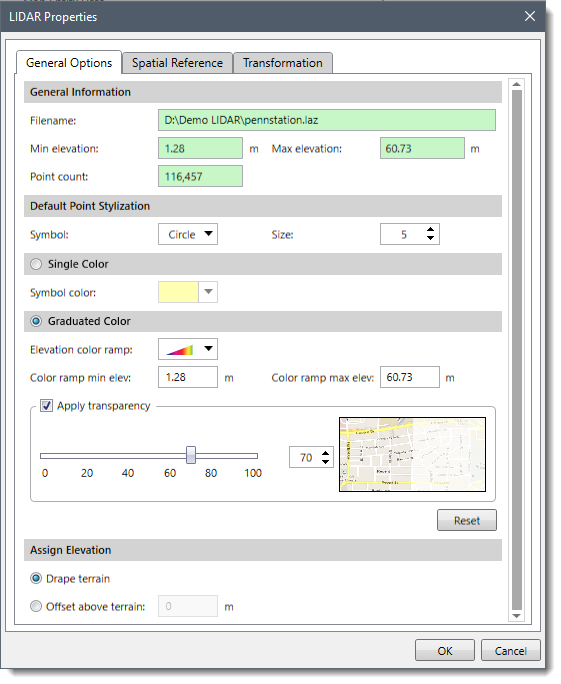
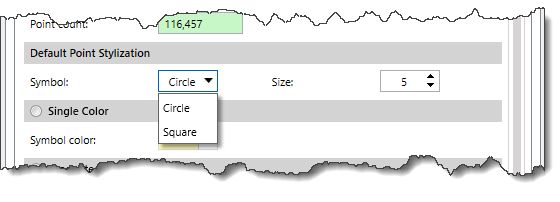
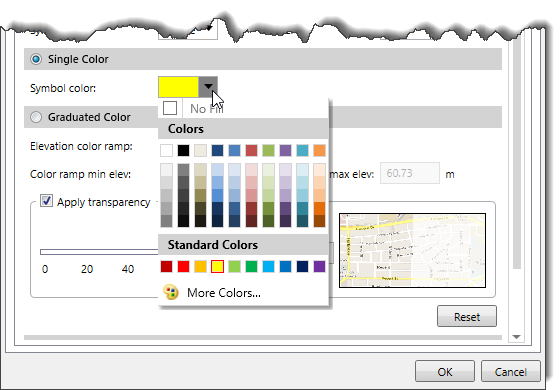
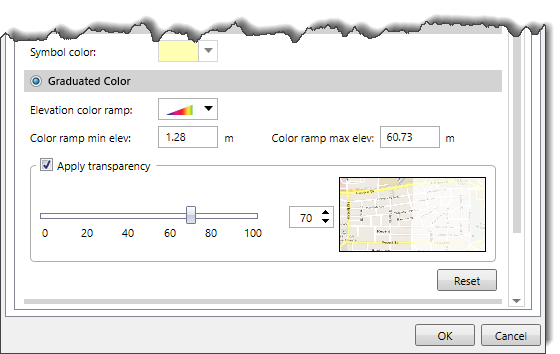
The user can change the visualization of the lidar data on the Map View by styling the point cloud objects of the LiDAR 3D point cloud. To view or modify the display properties of the LiDAR data, follow these steps:







CivilGEO G2 Reviews
4.8/5.0 Rating, Over 230 Reviews

GeoHECRAS is recognized as the top Civil Engineering Design Software with an average of 4.8 out of 5.0 rating from over 230 real user reviews on G2.



We use cookies to give you the best online experience. By agreeing you accept the use of cookies in accordance with our cookie policy.
When you visit any web site, it may store or retrieve information on your browser, mostly in the form of cookies. Control your personal Cookie Services here.








